
Gdzie najlepiej wysiąść z autobusu lub busa
ZSP Nr 2 jest zlokalizowane na osiedlu mieszkaniowym więc trudno tam dojechać autobusem. Przed szkołą jest niewielki parking i trudno będzie pomieścić tam wszystkich. Mocno rekomenduję postój na parkingu przy klasztorze. Jest rozległy i bezpieczny. Uczniów sugeruję wysadzić w zatoczce obok przystanku PKS/PKP i przejść do szkoły chodnikiem. Jest to najbezpieczniejszy sposób.
Wskazówki dojścia znajdują się na mapie poniżej.
Do zobaczenia na konkursie,
Maciej Polański
Wskazówki dojazdu i parkowania
Harmonogram Finału GG Robot 2025

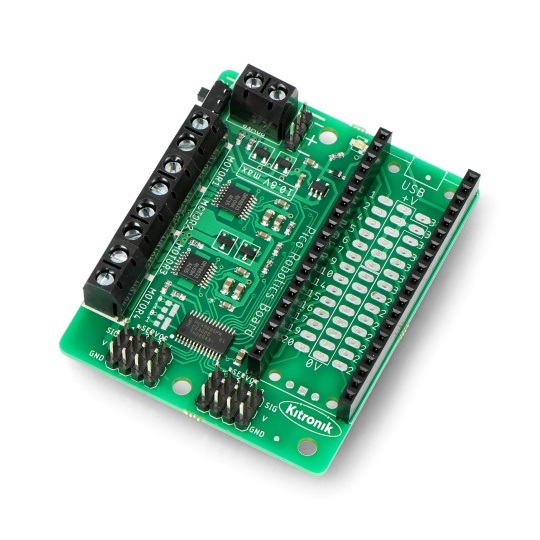
Nowa wersja płytki Kitronik Robotics Board
Na rynku pojawiła się nowa wersja płytki Kitronic Robotics Board. Można również z niej korzystać. Ma ona trochę większe możliwości rozbudowy o urządzenia korzystające z GPIO. No i inną bibliotekę. W razie potrzeby przekażę jak z niej korzystać.
Link do płyty:
Elementy do budowy „drugiego robota”
Zgodnie z regulaminem „drugi robot” musi być wykonany z następujących elementów:
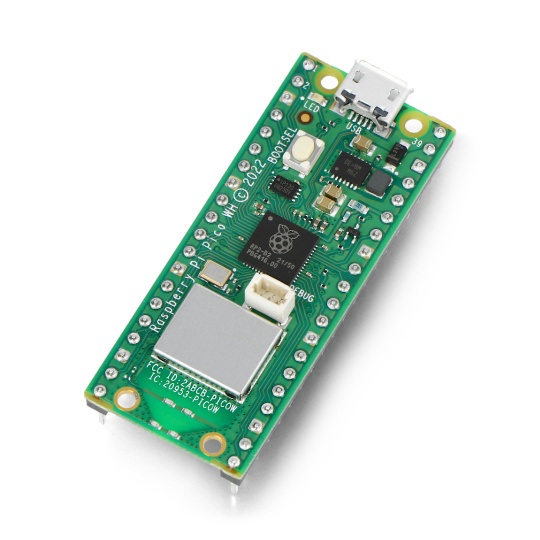
1. Jednostka sterująca: Raspberry Pi Pico WH – RP2040 ARM Cortex M0+ CYW43439 z WiFi oraz z wlutowanymi złączami.
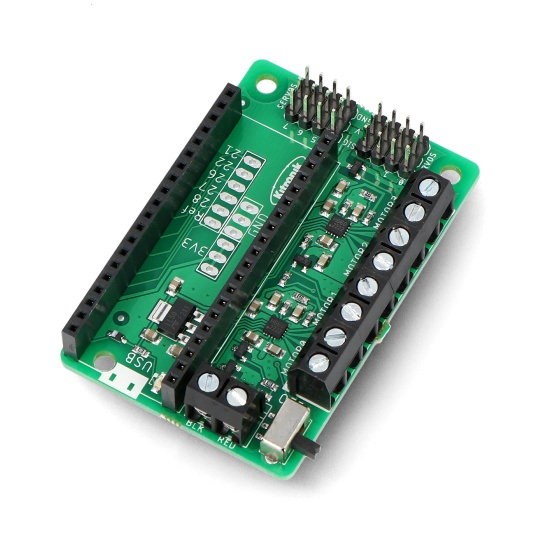
2. Simply Robotics Motor Driver Board – sterownik silników – do Raspberry Pi Pico – Kitronik 5348
3. Regulator napięcia – nie ma konieczności stosowania regulatora. Wskazany powyżej sterownik silników może pracować z zasilaniem do 12 V. Jednak w wypadku gdy stosujemy serwomechanizmy zbyt wysokie napięcie zakłóci ich pracę lub nawet może doprowadzić do uszkodzenia. Stąd w wypadku zastosowania serwomechanizmów należy dostosować napięcie do parametórw serwa, z jakiego korzystamy. W wypadku silników ma to mniejsze znaczenie. Przy dużym napięciu będą po prostu mocniejsze, przy małym słabsze. Poniżej przykładowa przetwornica step-down (obniżająca napięcie).

4. Akumulator – można użyć dowolnego źródła zasilania. Dobrym wyborem są akumulatory Li-Pol (litowo-polimerowe). Niezbędna będzie również ładowarka dedykowana do danego akumulatora. Poniżej przykładowy model.

5. Do akumulatora potrzebne będą również łącza.

Przy budowie „drugiego robota” można korzystać z dowolnych elementów konstrukcyjnych. Np. Lego Technic lub innych. Można również korzystać z dowolnych silników, serwomechanizmów i sensorów.
Więcej informacji w GG Bazie po zalogowaniu. Zarejestrowani wkrótce otrzymają dane dostępowe.
GG Robot 2025 – otwarcie rejestracji do konkursu
Rozpoczynamy rejestrację do GG Robot 2025 „Roboty działają lepiej, gdy są proste”. Można zarejestrować się do konkursu poprzez link:
Rejestracja do konkursu GG Robot 2025
Najważniejsze zmiany w tegorocznym konkursie to:
- Szkoła może zgłosić maksymalnie 3 drużyny,
- jeden robot może być zbudowany z dowolnych elementów dostępnych w szkole,
- drugi robot ma być wykonany na podstawie elementów elektronicznych wskazanych przez organizatora,
- można wystartować tylko jednym robotem.
Od połowy listopada będziemy prowadzić warsztaty, w których uczniowie będą mogli nauczyć się korzystać z elementów elektronicznych wskazanych do budowy drugiego robota. Mikrokontroler oraz jednostka sterująca będzie produktem niskokosztowym – w granicach 100 zł. Zależy nam na tym, by uczniowie mogli budować roboty i rozwijać swoje talenty nie koniecznie na drogich zestawach dostępnych tylko w szkole.
Rejestrację do konkursu kończymy 18 grudnia 2025 r.
Klasyfikacja generalna GG Robot 2024
Zgodnie z obietnicą publikuję tabelę GG Robot 2024 – klasyfikacja generalna:
Tabele wyników GG Robot i GG Robot Open 2024
Poniżej linki do kategorii:
GG Robot:
GG Robot Open:
Harmonogram treningów – 23 kwietnia 2024 (wtorek)
Harmonogram treningów dostępny pod linkiem poniżej: